Overview:
The PJ board uses a 4 bit asynchronous protocol to communicate with the Raspberry Pi using GPIO interrupts to minimize latency. The protocol is out of the scope of this document at the moment.
Debugging data from the j4b bus:
The data from this driver can be inspected using the getj4bmsg utility. As usual you will have to to complile the utility:
cd /home/pi/utilities/getj4bmsg/
make clean
make
The use of this utility is beyond the scope of this document as well, however examples for reading the controller state and voltage information can be found in two shell scripts in the utility directory:
getvoltstest.sh
getjoytest.sh
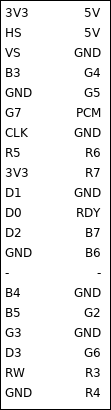
PI GPIO Header Pins: